Este montón de letras todas juntas que hacen una palabra impronunciable es el European Railway Traffic Management System, en español Sistema Europeo de Gestión de Tráfico Ferroviario.
Como habéis podido adivinar cuando hemos hablado de otros países, cada administración ferroviaria ha hecho su propio reglamento, ha creado su forma de circular y sus propios sistemas de señalización. Esto ha provocado que, tradicionalmente, los trenes internacionales tuvieran que cambiar de locomotora y de maquinista en cada frontera, lo cual era un problema, especialmente, en los pasos por Suiza, Bélgica y Luxemburgo, por ejemplo, donde había que cambiar todo para pasar por un país pequeñito. Así que las adminsitraciones ferroviarias se pusieron de acuerdo para crear unos pocos trenes que pudieran pasar las fronteras y tuvieran instalados todos los sistemas que exigía cada país. Así, por ejemplo, una rama Thalys (trenes de AV que circulan entre Alemania, Holanda, Bélgica y Francia) tenían que estar equipados con LZB (Alemania), KVM (Francia), Crocodile (Bélgica)… Y además tenían que poder circular con tensiones de 25.000 y 15.000 Voltios en alterna y 1.500 y 3.000 en continua. En fin, un lío.
Entonces, la Agencia Ferroviaria de la Unión Europea (ERA), se reunió para crear las normas de interoperabilidad, es decir, características comunes que deben de cumplir las distintas administraciones para que puedan circular por sus redes trenes de otros países de la Unión y a su vez trenes que puedan operar en redes de otros países.
Y entre esas normas de interoperabilidad está el ERTMS. Para ello, la ERA creó el ERTMS Group, donde están representados tanto la propia ERA, como las administraciones nacionales, pasando por los operadores ferroviarios de los países, los fabricantes de trenes, así como los fabricantes de sistemas de señalización y comunicaciones. Este sistema pretende implantar un único sistema de gestión ferroviaria en toda Europa y engloba varios subsistemas: control de trenes (ETCS – European Train Control System, Sistema Europeo de Control de Trenes), control de la circulación (ETML – European Traffic Management Layer, Capa Europea de Gestión de Tráfico) y comunicaciones y posicionamiento de trenes.
En estas páginas trataremos sobre el ETCS y un poco sobre la parte de comunicaciones. Cabe reseñar que, seguramente por simplicidad, se suele hablar de ERTMS cuando realmente se quiere decir ETCS. Por eso no es raro escuchar hablar de ERTMS refiriéndose sólo a la parte de control de trenes.
Pero antes, un pequeño apunte sobre la parte de comunicaciones, ya que, más adelante, empezaremos a mezclarlo con el ETCS.
Para una interoperabilidad completa, la ERA estableció que debía de haber un sistema de comunicaciones universal en toda la UE. En el Grupo ERTMS se decidió usar el sistema llamado GSM-R (Global System for Mobile Communications-Railway), que en realidad no es más que un sistema GSM (el de la telefonía móvil que usamos todos), pero con bandas de frecuencia reservadas para uso ferroviario. Y se eligió, precisamente, por su universalidad (el sistema GSM funciona en todo el mundo), su facilidad para usar otras frecuencias diferentes a las de la telefonía pública y a su capacidad de transmitir voz y datos. También podréis encontrar que se le llama “eurorradio” o sistema EIRENE (European Integrated Railway Radio Enhanced Network, Red Europea Mejorada de Radio Integrada para el Ferrocarril, o algo así, creo que no tiene nombre en español). Ahora sí, vamos al lío.
ETCS
La finalidad última del ETCS es dar una información en cabina única, independientemente del país en el que se esté y supervisar que se cumplen las condiciones de circulación. De esta forma, un maquinista alemán (por poner un ejemplo), podría llevar un tren desde Algeciras hasta Copenague sin tener que aprenderse los distintos reglamentos.
El ETCS se divide en cinco niveles: 0, 1, 2, 3 y STM.
El nivel 0 es la ausencia de ETCS, es decir, que se circula con el sistema de seguridad nacional, con el equipo ETCS encendido pero que hace nada.
El nivel 1 es un sistema de transmisión puntual y supervisión continua que usa balizas en puntos determinados para transmitir información y el equipo embarcado supervisa continuamente que se cumplen las condiciones indicadas por las balizas. Con N1 se puede circular hasta 300 km/h.
El nivel 2 es un sistema de transmisión continua y supervisión continua en el que los trenes se comunican con las instalaciones a través de radio (también pueden recibir información de balizas). Con N2 se puede circular hasta 350 km/h.
El nivel 3 también es un sistema de transmisión continua y supervisión continua, pero en el que prescindimos totalmente de la señalización lateral e incluso de los sistemas de detección de tren (circuitos de vía y contadores de ejes principalmente). Los trenes se autolocalizan gracias a sistemas de posicionamiento por satélite y se comunican con las instalaciones por radio.
Y por último, el nivel STM es un nivel 0, pero en el que es el equipo ETCS el que hace la supervisión del sistema nacional (en España existen STM-ASFA y STM-LZB, y en su momento existió el STM-ATP).
Como hemos estado viendo hasta ahora, el ERTMS también está formado por dos partes: la de vía y la embarcada.
Equipo de vía
Nivel 1
A lo largo de nuestra vía vamos a tener puntos donde el tren va a recibir información. Generalmente, estos puntos están asociados a señales, pero no necesariamente. En esos puntos, vamos a tener grupos de balizas que transmiten la información al tren. Las señales tendrán, por lo general, dos grupos de balizas asociados: uno previo y otro en la señal. Al grupo previo lo llamamos “grupo in-fill” y al grupo de señal pues así mismo. Estas balizas también reciben el nombre de “eurobalizas”, así que veréis en este texto indistintamente que hablo de balizas o de eurobalizas, pero me refiero siempre a lo mismo.
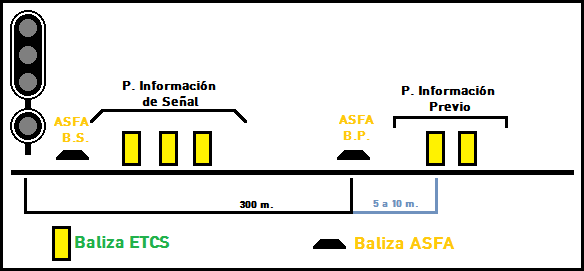
Esquema de instalación de balizas ETCS.
En el esquema que vemos arriba hemos representado dos balizas in-fill y tres de señal, que es lo más habitual en España, pero el número de balizas por cada grupo es variable, pudiendo tener cada grupo hasta un máximo de 8 balizas.

Balizas ERTMS de la señal S2/5 de Madrid-Chamartín (en los recuadros rojos). En la vía 4, un Alaris (serie 490) estacionado esperando la hora de salida hacia Valencia. Foto: Yago López Carvajal, julio 2009.
Tenemos dos tipos de eurobalizas: fijas y conmutables. Las balizas fijas son las que tienen programadas unos telegramas fijos que no pueden cambiar y las conmutables son las que tienen programadas telegramas que, gracias a la conexión con otro equipamiento, pueden transmitir unos u otros.
Generalmente las balizas fijas tienen información del perfil estático de velocidad (SSP – Static Speed Profile, la velocidad máxima de la línea), el gradiente de la línea (la declividad, o sea rampas y pendientes), su posición geográfica (con indicación de la línea a la que pertenecen y el punto kilométrico), así como otros datos de identificación (grupo de balizas al que pertenecen, número de orden dentro del grupo, si están enlazadas o no con otro grupo de balizas, identificación del grupo de balizas enlazado…).
Las balizas conmutables, además de sus datos de identificación, incluyen información sobre el estado de la señalización, así como distancias y velocidades meta y limitaciones temporales. También tienen información de cuánto tiempo es válida esa información.
Se diferencian unas de otras a simple vista porque las conmutables tienen un cable y las fijas no.
Los grupos de balizas están conectados a las instalaciones mediante unos equipos que codifican esa información. Son los LEU (Lineside Equipment Unit), que están en comunicación con los enclavamientos y seleccionan la información que tienen que transmitir las balizas.
Finalmente, en las salas donde están los enclavamientos encontramos los equipos interfaz, que son los que obtienen la información del enclavamiento y la transmiten a los LEU.
Nivel 2
El equipamiento de vía se simplifica muchísimo, porque ya prácticamente no necesitamos balizas. Toda la comunicación se realiza mediante conexión de datos por GSM-R. Podemos quitar todas las balizas de señal y dejaríamos sólo algunas balizas fijas repartidas por la línea que servirían únicamente para relocalización del tren. No obstante, en España, en las líneas que tienen sólo N2, se han instalado grupos de balizas en las señales para permitir las entradas al sistema, es decir, que el equipo embarcado reciba la orden empezar a funcionar.
Así que pasamos de tener balizas y LEUs por la línea a tener antenas de telefonía móvil GSM-R. Pero aparece un nuevo equipo de por medio. Es el RBC (Radio Block Center, Centro de Bloqueo por Radio), que es con el que se va a comunicar mi tren y el que me va a enviar las MA (más adelante vemos qué es esto).
Gracias a la odometría del tren, éste sabe siempre dónde está y se lo transmite al RBC, para que me envíe las MA que sean mías. Pero como la odometría no es exacta (hay tolerancias, pero además puede haber patinajes, por lo que el conteo de distancia puede alterarse), para evitar esos desfases tengo las balizas de relocalización, que son balizas fijas que transmiten la posición geográfica en la que están. Además, las balizas de señal también van a ayudar a relocalizar el tren o a transmitir otras informaciones.
Desde el RBC también se pueden enviar puntos de parada incondicional, es decir, mandar EOA (explicación más adelante) virtuales a los trenes para que se detengan. Normalmente esto se hace por incidencias o emergencias y los trenes no pueden rebasar esos puntos hasta que se revoquen desde el RBC.
Equipo embarcado
A bordo de los trenes tenemos los captadores de las balizas, que van bajo bastidor, los equipos que evalúan la información y la transmiten a las cabinas de conducción, y ya en ésta, el DMI (Driver-Machine Interface, Interfaz Maquinista-Máquina) que es la pantalla donde se le muestra al maquinista la información. A este DMI también se le llama a veces “eurocabina”. Si el equipo embarcado tiene Nivel 2, también habrá dos módems GSM-R que se encargarán de la comunicación con los RBC.
El DMI es una pantalla táctil que se sitúa en el pupitre de conducción del tren o de la locomotora y que, aparte de mostrar toda la información que el maquinista necesita para circular, le permite interactuar con el resto del sistema. Se prescinde así de otros botones, pulsadores o manetas, haciendo que este equipo sea universal, se pueda instalar en cualquier vehículo y que su manejo sea igual en todas sus variantes.
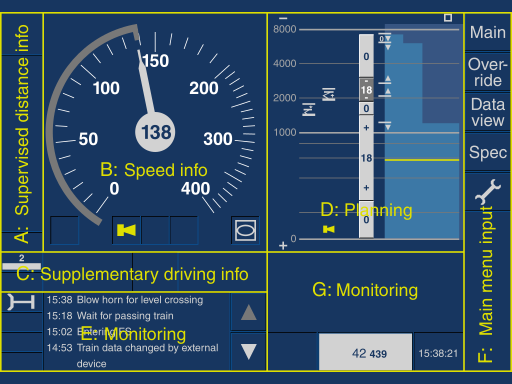
Estructura genérica de un DMI de ETCS. Imagen de Marten de Vries, con licencia Creative Commons de dominio público extraída de Wikimedia Commons (https://commons.wikimedia.org/wiki/File:DMI_ETCS-areas.svg)
La pantalla está dividida en varias partes, como vemos en la imagen superior.
- El área A es la distancia supervisada que se muestra con una barra que va decreciendo según te aproximas al final de esa distancia. Es lo que en otros sistemas hemos llamado distancia meta.
- El área B es el área de información de velocidad. Aquí se nos muestra la velocidad real del tren mediante una aguja y una cifra en el centro de esa aguja. Esta aguja puede aparecer dibujada en color blanco (circulamos correctamente), en color amarillo (primer escalón de sobrevelocidad, acompañado de un aviso acústico), en color naranja (segundo escalón de sobrevelocidad acompañado de un aviso acústico más intenso) o en color rojo (intervención del equipo en el freno). Podemos ver también un arco alrededor del velocímetro que acaba en un “ganchito”. Esa es la velocidad límite, la que nos marca la curva de frenado y la que no debemos superar. También este arco puede cambiar de colores para indicarnos lo mismo que la aguja. En la parte baja, a la derecha, tenemos el icono que nos va a indicar el modo en el que está funcionando el equipo en ese momento. Hay 17 modos diferentes.
- El área C contiene la información suplementaria para la conducción, como pueden ser el nivel en el que está operando el sistema u otras informaciones.
- El área D es el área de planificación y es donde nos muestra de forma gráfica cómo varía nuestra velocidad meta (a la derecha), así como la declividad de la línea (la barra del centro) y otras informaciones como pueden ser zonas de bajada de pantógrafos, zonas neutras de catenaria, puentes, túneles, estaciones, zonas de inhibición de los aparatos de alarma de viajeros…
- El área E es de monitorización y en ella aparecerán mensajes de texto informativos de eventos que ocurran. A la izquierda de esta área podremos ver si el equipo tiene conexión radio o no.
- El área F es el menú principal y pulsando en los diferentes botones podremos interactuar con el equipo.
- Por último, el área G, también de monitorización en la que podremos ver, principalmente, la hora del equipo (si vemos que avanzan los segundos es la señal de vida de que el equipo está funcionando) y la ubicación actual del tren.
Movement Authority – MA (Autoridad de movimiento)
Todo el sistema ETCS se basa en que el tren, por el modo que sea, recibe una Movement Authority o MA (Autoridad de movimiento). Estas MA autorizan al tren a continuar circulando una distancia determinada a una velocidad determinada y durante un tiempo definido. En función de esa MA, el equipo embarcado una curva de frenado que el maquinista tendrá que cumplir y que podrá estar complementada con otra información.
Las MA están compuestas por unas cosas que ya conocemos: una distancia meta y una velocidad meta. Pero las MA también incluyen el perfil estático de velocidad (SSP – Static Speed Profile, la velocidad máxima del trayecto), las restricciones temporales de velocidad (TSR – Temporary Speed Restrictions, las LTVs) y el gradiente de la línea (la declividad, o sea, rampas o pendientes). Pero también las MA tienen un tiempo de vida. Si transcurre ese tiempo y no ha llegado una renovación de MA (es decir, nueva información fresca), ésta se destruye y, generalmente, reduce la distancia meta para llegar sólo hasta la siguiente señal. Es lo que se llama un “recorte de MA”.
Lo explico con unas imágenes.

Cantón típico de BCA con itinerario de salida de «A» y entrada a «B».
Al pasar por la señal de salida de “A” recibo una MA para circular a 300 km/h durante 32 km (suele ser la distancia máxima que tienen las MA), ya que la señal de entrada de “B” está en Vía Libre (y la salida también aunque no la veamos), por lo que tengo todo ese tramo libre. En el momento en que he recibido la MA, la situación de las señales es esa, pero eso puede cambiar.
Una de las funciones de los enclavamientos que no habíamos comentado antes, y que ampliaré más adelante, es que, una vez establecido un itinerario para un tren, éste no puede modificarse hasta no haber garantizado que el tren ya se ha detenido. Y ésto se consigue aplicando un temporizador al enclavamiento que va a mantener todos los aparatos en la posición en la que estaban durante un tiempo establecido. En la RFIG esos tiempos van desde 30 segundos hasta 6 minutos. A esos temporizadores los llamamos “diferímetros”.
Bueno, pues la temporización de las MA, también llamada timer, está relacionada con esos diferímetros. Es decir, que cuando yo recibí mi MA, todas las señales estaban en Vía Libre y tenía todo el itinerario para mí. Pero si, por algún motivo, me tienen que cerrar las señales, el enclavamiento aplicará el diferímetro e inmovilizará las agujas en la posición que tenían para mí durante ese tiempo. Con eso se garantiza que yo podré pasar sin descarrilar y que no se podrá abrir ninguna señal para otro tren que deba recorrer un itinerario incompatible con el mío. La señal se cerrará, al renovar la MA mi equipo me aplicará freno de emergencia, yo me llevaré un susto tremendo, pero no va a pasar nada más.
Pero, ¿y si resulta que durante ese trayecto tengo algún problema y me tengo que detener, pongamos, 7 minutos? Pues que las condiciones en las que yo recibí mi MA han cambiado. Al tardar yo más de los 6 minutos del diferímetro (más el tiempo del trayecto) en recibir la renovación de MA, el sistema ya no es capaz de garantizarme que el itinerario siga dispuesto para mí. Muy probablemente, vamos, con casi el 100% de seguridad, todo seguirá igual. Reglamentariamente un Responsable de Circulación no puede modificarme el itinerario si yo no le doy mi conformidad, salvo emergencia, que quiere decir que voy a ser capaz de detenerme de forma segura antes. Pero el equipo no se fía de las personas y dice: “mira, yo ya no sé si algo ha cambiado, así que por si acaso, te recorto la MA hasta la siguiente señal, y una vez allí, ya veremos qué pasa”.
Y eso es lo que ocurre, que al expirar el timer, el equipo me recorta la MA hasta el siguiente grupo de balizas donde tenía que renovarla, poniéndome en ese punto una parada, un EOA (End of Authority, fin de autoridad).
Pero bueno, volvamos a nuestra MA…
El equipo embarcado va a vigilar constantemente que yo no me salga de mi MA, es decir, que no supere la velocidad límite y que no rebase el EOA, calculando una curva de frenado en función de la composición del tren y su porcentaje de frenado, datos que le hemos proporcionado al equipo al “iniciar misión”, o sea, al encenderlo.
Velocidad de liberación
Es posible que nos ocurra que tengamos una MA hasta una señal, porque cuando recibimos esa información esa señal aún estaba cerrada (como ocurre en la imagen anterior), pero que al llegar nos la encontremos ya abierta. En este caso lo que ocurre es que hasta que no lleguemos a las balizas in-fill, no renovaremos la MA y nuestro equipo seguirá pensando que tiene un EOA a la altura de la señal, aunque esté abierta. Por lo tanto el equipo nos obligará a frenar y ponernos en condiciones de parar hasta que reciba nueva información.
En las aproximaciones a señales en indicación de Parada, se aplica una velocidad de liberación, definida por cada administración nacional. Es uno de los llamados Valores Nacionales (NV – National Values) que cada país puede adoptar. No obstante, la norma indica que las velocidades de liberación deben calcularse en función de la distancia al punto de peligro (DP – Danger Point), que es el punto que nunca debe sobrepasar un tren. Los DP suelen ser piquetes de entrevías o toperas. Aún así, cada administración puede decidir valores diferentes. Así, por ejemplo, en España se han establecido, por lo general, velocidades de liberación de 15 km/h en la aproximación a señales en Parada y 10 km/h en aproximaciones a toperas. Pero puede haber (de hecho las hay) señales con otras velocidades de liberación. La velocidad de liberación sólo aplica al Nivel 1, ya que, necesariamente, voy a tener que “pisar” unas balizas de una señal que el equipo aún cree que está en rojo.
En N2, como tenemos comunicación continua, en cuanto cambie el aspecto de la señal, se renovará la MA y no necesitaré acercarme a la señal para recibir nueva información. No obstante, hay algunos casos determinados en los que en N2 sí hay velocidad de liberación, y suele ser en lugares en los que tengo que estacionar mi tren muy cerca de la señal y la curva de frenado normal me impondría una velocidad límite ridícula y difícilmente operable, del orden de 2-3 km/h. Entonces, me ponen una velocidad de liberación de 10 o de 15 y así ya puedo llevar mi tren hasta el punto de estacionamiento correcto (esto ocurre, por ejemplo, en Segovia-Guiomar o en Zamora).
EOA y LOA
Al final de la MA podemos tener dos clases de puntos: los EOA que ya hemos comentado) y los LOA (Limit of Authority, limitación de autoridad de movimiento).
Los EOA son puntos de parada, es decir, que la velocidad meta en ese punto es cero y los LOA son puntos en los que la velocidad meta es distinta de cero (por ejemplo, el inicio de una LTV o el punto donde cambia la velocidad máxima). Vuelvo a la imagen del DMI para verlo gráficamente.
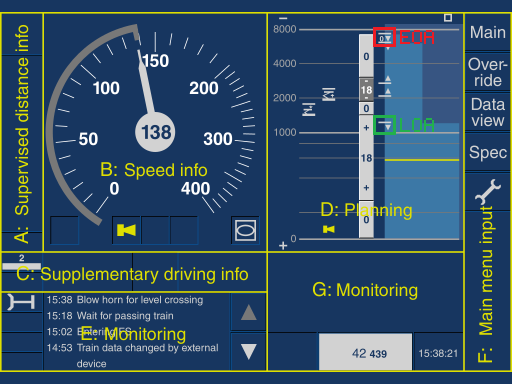
En el área de planificación (D) podemos ver la representación gráfica de un EOA (en rojo, flechita hacia abajo con un “0”) y de un LOA (en verde, flechita hacia abajo sin número).
Curvas de frenado
Hemos hablado de curvas de frenado, pero no hemos visto qué pinta tienen. La imagen a continuación sería una representación. La velocidad límite es la que el maquinista no debe superar. La velocidad de aviso es a partir de la cual el sistema avisará al maquinista que se está pasando. La velocidad de supervisión es a la que el tren empezará a frenar (frenada de servicio, o sea, normal) hasta que la velocidad baje por debajo de la velocidad límite, luego, el tren libera el freno. Y, por último, la velocidad máxima de seguridad, a la que el tren aplicará el freno de urgencia. La diferencia entre la curva más baja y la más alta será de entre 5 y 15 km/h, es decir, si la velocidad límite es 300 km/h, la curva rosa estará entre 305 y 315 km/h.
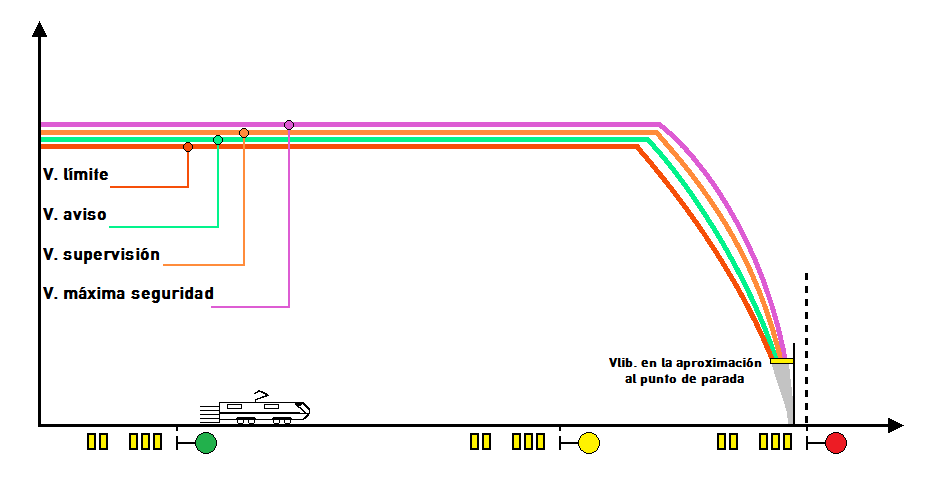
Curva de frenado típica hacia un EOA
En la imagen vemos una representación típica de una curva de frenado para Nivel 1, ya que tiene velocidad de liberación. En las curvas de frenado típicas de Nivel 2, las líneas de colores llegarán hasta el cero.
Como comentábamos, la velocidad de liberación sirve para poder aproximarme a las balizas para refrescar la información. Vamos a ver gráficamente cómo cambian las curvas de frenado en caso de que la señal del final de mi MA se abre.
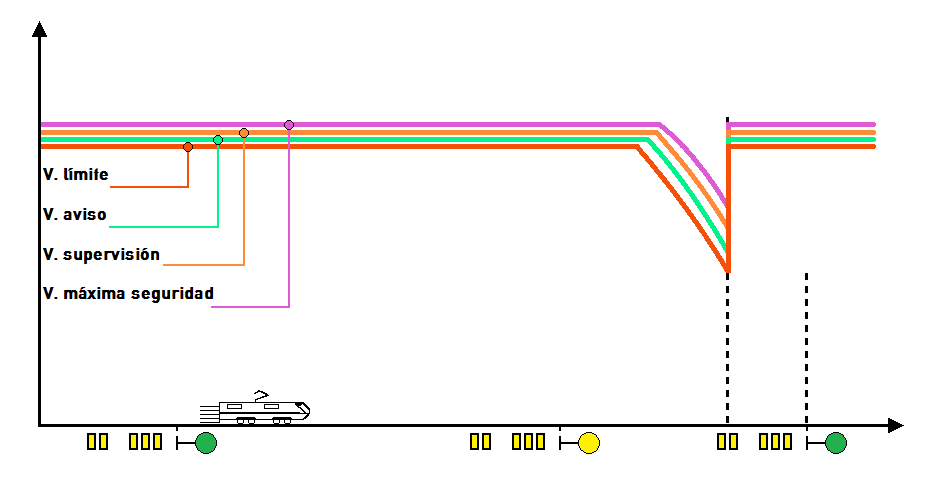
Liberación de la curva de frenado al recibir nueva información en las balizas in-fill.
Aclaro que he representado la renovación de la MA en el grupo in-fill, pero que esa renovación también se produce en las balizas de señal.
Para evitar que mi equipo entre en curva de frenado cuando estoy viendo la siguiente señal en verde, el ETCS permite complementar la información de las balizas mediante “eurolazos” instalados en unos cientos de metros antes de la señal. Es un cable radiante, instalado en bucles por el centro de la vía que transmite de forma continua la misma información que las balizas. También podréis ver que se les llama euroloops.
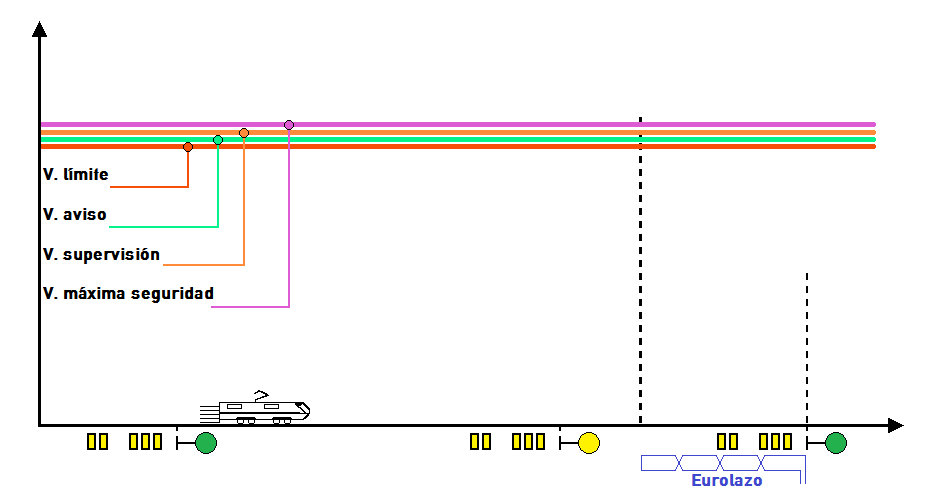
Renovación de la MA al llegar el tren al eurolazo.
Como vemos aquí, el eurolazo transmite la nueva información de la señal antes de llegar a las balizas in-fill y el equipo no llega a entrar en curva de frenado.
Las imágenes de arriba son un ejemplo. Como las distancias de frenado pueden ser muy grandes, sobre todo en Alta Velocidad, lo más probable es que mi equipo entre en curva de frenado mucho antes y yo llegue al eurolazo o a las balizas a pequeñas velocidades.
Modos de funcionamiento
Los modos en los que puede funcionar el ETCS son 17 y cada uno con un nombre formado por siglas. En esta lista no están todos, ya que hay modos que no se suelen usar nunca o que no están implementados en todos los equipos o incluso modos “técnicos” que el maquinista no puede operar.
- SB: stand by. Cuando encendemos el equipo entra en este modo hasta que introducimos los datos e iniciamos misión.
- UN: unfitted o sin equipar. Este modo está activo cuando circulamos por una línea sin ERTMS. Generalmente, este modo aparece al seleccionar el N0, o al llegar a una transición de final de ERTMS.
- FS: full supervision o supervisión completa. Es el modo de conducción normal en el que el equipo controla todo.
- SR: modo staff responsible o modo responsabilidad del maquinista. Este modo se activa bien tras el stand by (por no tener información aún), bien al salir del modo OR tras un rebase de señal debidamente autorizado.
- SH: modo shunting o modo de maniobras. Este modo se activa cuando vamos a hacer maniobras protegidas por el ETCS. Nos supervisará una velocidad máxima de 30 km/h y sólo nos permitirá pasar señales con indicación de rojo-blanco fijo (indicación para maniobras). Puede activarlo el maquinista manualmente o que lo envíe la vía.
- OS: modo on sight o modo marcha a la vista. Este modo se activa cuando pasamos una señal con indicación de rojo-blanco intermitente (indicación para un itinerario de entrada a una vía ocupada por otro tren). Nos supervisa una velocidad máxima de 30 km/h y es el maquinista el responsable de detener el tren ante cualquier obstáculo.
- TR: trip, rebase indebido de un EOA. Entrar en este modo es el que provoca el frenado de emergencia del tren. Puede ser porque hemos rebasado indebidamente un EOA, o porque la MA que teníamos ha sido revocada.
- PT: post trip, lo que ocurre después de un trip. Es el modo en el que entra el sistema una vez detenido el tren tras un trip. Sólo permite el movimiento hacia atrás del tren un máximo de 50 metros. Esto es así por si hemos rebasado indebidamente una señal y vemos un peligro de accidente inminente, darnos la posibilidad de retroceder el tren.
- OR: override o rebase. Es el modo en el que entra el equipo cuando actuamos para un rebase (autorizado) de EOA.
- RV: reversing, es el modo de retroceso, por si hay que retroceder por obstáculos en la vía, por ejemplo.
- NL: non-leading. Es el modo que se usa en tracción múltiple (varios vehículos motores acoplados traccionando el tren) en los vehículos que no están en cabeza. En este modo el equipo está encendido pero no reacciona.
- SF: system failure, o fallo de sistema. Es el modo en el que entra el equipo cuando hay un fallo que compromete el funcionamiento del equipo. Se aplica freno de emergencia hasta la parada y la única forma de salir de ahí es reiniciar el equipo o apagarlo completamente y circular al amparo de otro sistema.
- IS: isolation o que el ERTMS está inhibido.
Además de supervisar la velocidad de forma continua, el equipo va a estar supervisando la integridad de los datos que envían las balizas, es decir, que éstos sean coherentes con información que han recibido anteriormente. Para ello, cada grupo de balizas estará identificado y transmiten esa identificación. También indican al embarcado cuántas balizas forman parte de ese grupo y cómo se llaman, para que el equipo pueda comprobar que ha recibido todo bien. Pero también se transmite cuál es el nombre del siguiente grupo de balizas que tiene que leer. De esa forma, el equipo embarcado está esperando nueva información y sobre todo, de quién le tiene que venir. Pero es que además la información que recibe desde un grupo de balizas tiene que ser coherente mientras el tren está leyendo el grupo entero. Si, por casualidad, cambiara una señal mientras estoy leyendo datos y la información que recibo de una baliza no coincide con la de la siguiente, el equipo interpreta que los datos no son coherentes.
Incoherencia de datos de balizas
Se llama “incoherencia de balizas” al caso en el que los datos no sean coherentes, que un grupo de balizas no sea el esperado, que falten datos de una baliza, en fin, cualquier situación que haga que no se pueda comprobar la integridad de los datos de un grupo de balizas. La incoherencia de balizas provoca un frenado de servicio en el equipo embarcado poniendo un EOA “en el morro”, es decir, que el equipo me lleva a la parada y una vez detenido me coloca un EOA virtual justo delante de mi tren que impide que pueda avanzar más. Además, en el área de texto del DMI me aparecerá el mensaje que indica incoherencia de balizas. Para poder continuar tendré que solicitar al Puesto de Mando que me autorice a rebasar ese EOA virtual, pasando del modo FS (full supervision) al modo OR (override, rebase) y una vez rebasado el EOA el equipo pasa al modo SR (staff reponsible, responsabilidad del maquinista) en el que sólo me va a supervisar una velocidad máxima de 100 km/h y que no rebase una señal en Parada.
Si en el siguiente grupo de balizas recibo información válida, el equipo me renovará la MA y pasará de nuevo a modo FS. Y si sigue siendo incoherente, volvemos a empezar.
Hay ocasiones en las que la incoherencia de datos no afecta a la MA, ya que la información procede de informaciones de señales que veo “de espaldas”, por ejemplo. En esos casos el equipo sólo avisa, pero no reacciona.
En Nivel 2, si hay una incoherencia en los datos de las balizas, el equipo sólo me informará, pero no provocará frenado, ya que la MA válida es la que llega desde el RBC.
Gestión de LTV
Como hemos dicho, el ETCS puede controlar también las LTVs que haya que poner en la línea por los más diversos motivos. Como el ERTMS es un sistema en evolución, dependiendo de cuándo se pusiera en servicio y, sobre todo, de la versión sobre la que esté programado, la gestión de LTVs puede ser (y lo es) diferente según la línea, aunque básicamente funcionan igual.
En el Puesto de Mando hay un ordenador llamado PCE (Puesto Central ERTMS) que, entre otras cosas, sirve para introducir las LTVs al sistema. El operador de ese puesto le dirá al sistema el punto de inicio de la limitación, el punto final y el valor de la limitación. El PCE se lo transmitirá al resto de equipos del sistema y, tras un tiempo de propagación de la información, ésta estará disponible para los trenes.
En el Nivel 1, el PCE transmite a los interfaces de los enclavamientos afectados y éstos le pasan la información a los LEU, que a su vez codificarán esa información para las balizas.
En el Nivel 2, el PCE envía la información al RBC y éste se encarga de transmitirla a los trenes a través de las MA.
La diferencia principal de cómo se transmiten las LTVs según la línea en la que estemos viene por el PK de inicio, el PK final y el valor de la limitación.
Por ejemplo, en el Nivel 1 de la línea Madrid-Barcelona-Frontera Francesa, las LTV se implantan por trayectos completos y con sólo 3 valores: 80, 160 y 230. Es el maquinista el que tiene que adaptar la velocidad al valor real de la limitación, porque en su DMI sólo va a recibir esos valores. En el Nivel 2 de la misma línea (ahora inactivo), las limitaciones de implantan por circuitos de vía y con los mismos 3 valores.
Sin embargo, en la línea Olmedo-Ourense, que sólo tiene Nivel 2, las LTV se transmiten de PK real a PK real y con el valor real en escalones de 5 km/h. Lo mismo ocurre con el N1 del Eixo Atlántico (Vigo-Santiago-Coruña).
Pero en las Cercanías de Madrid (de momento sólo la línea C-4 entre Parla y Alcobendas/Colmenar tiene ERTMS N1) las LTVs son de valor real, pero por circuitos de vía.
Como veis, un lío. En cualquier caso el maquinista tiene que hacer lo que llegue a su DMI.
Nivel 3 y otros
Del Nivel 3 tampoco hay mucho más que comentar, salvo que también desaparecen las balizas de relocalización y que la situación de los trenes se hace por geolocalización por sistemas satelitales (GPS, GLONASS, Galileo…), existiendo comunicación continua a través del GSM-R. También se introducen los cantones móviles. En el N3 desaparecen también las señales y los enclavamientos, haciendo sus funciones los RBC de la línea. No hay, de momento, ninguna línea en servicio con N3 puro.
Existe una versión del N3 menos costosa que se ha llamado ERTMS Regional. Se trata de una versión de bajo coste del N3 pensado para líneas con poco tráfico. Se realizó de forma experimental en un tramo de la línea Västerdalsbanan entre Malung y Repbäcken en Suecia. Se puso en servicio en el año 2012, pero pronto se canceló el proyecto de usarlo en trenes de viajeros debido al alto coste de equipar los trenes, aunque sigue funcionando para los trenes de mercancías de esa línea (que no tiene tráfico de viajeros). Posteriormente, en 2017, RFI (Rete Ferroviaria Italiana, el administrador de infraestructura de Italia) retomó el proyecto para pruebas en la línea Avezzano-Roccasecca. El ERTMS Regional no contempla cantones móviles, sino cantones de longitud fija. Las funciones de los enclavamientos de las estaciones y del RBC las asume el TCC (Train Control Center, centro de control de trenes) desde el lugar donde se controle toda la línea y en las estaciones sólo se instalan controladores de objetos, que son simples interfaces entre el TCC y el equipamiento de campo, pero que no comprueban los itinerarios (ya lo hace el TCC). En la línea tampoco hay que instalar sistemas de detección de trenes (ni circuitos de vía, ni contadores de ejes) ya que son los propios trenes los que transmiten su posición al TCC. En Suecia, el límite de velocidad de este sistema es de 70 km/h.
Nivel STM
Para que el ERTMS sea completamente interoperable, sólo debe usarse un equipo de seguridad en cabina, y es el ETCS. Pero en los distintos países de Europa cada uno tiene su propio sistema de protección. Para eso se inventa el STM (Standard Transmission Module, módulo de transmisión estándar). Es un equipo que capta las señales de la vía del sistema nacional de protección y se comunica con el equipo ETCS para presentar su información en en DMI. De esa forma desaparecen de la cabina los distintos sistemas y pasan a formar parte del ETCS, que operará según cada sistema nacional.
En España tenemos (o hemos tenido) STM con ASFA analógico, ATP-EBICAB y LZB. Lo que ocurría en cada caso es que, al seleccionar el Nivel STM que corresponda al sistema de protección de la la línea, el equipo embarcado de ETCS se comporta como el sistema nacional. En el caso del STM-ASFA, en el DMI aparecían el velocímetro y los pulsadores del panel repetidor. En el caso del STM-EBICAB, ocurría lo mismo, junto con la parte de introducción de datos de tren, que se hacía a través del DMI. Y, por último, en el STM-LZB ocurre lo mismo.
Con el cambio a ASFA Digital, la función STM queda un poco diluída, ya que no sólo se emplea la parte de captación, sino que el maquinista interactúa directamente con los pulsadores y la pantalla de ASFA Digital, quedando el DMI como simple velocímetro.

STM-LZB de un DMI de ETCS de un tren de la serie 130 de Renfe.
Pero no todos los trenes que circulan por líneas con ERTMS tienen módulos STM instalados. Por ejemplo, los Civia de Cercanías Madrid no tienen STM-ASFA. Ni los trenes de la serie 121 tienen STM-ASFA, ni STM-LZB (llevan ASFA y LZB independientes). Sí lo tienen, por ejemplo, los trenes de las series 102, 112, 130 y 730. El STM es opcional. Lo que sí es obligatorio es que los trenes tengan instalado un sistema de seguridad compatible con las líneas por las que van a circular.
Señalización específica para líneas con ERTMS
Cuando se hizo la línea de alta velocidad de Madrid a Barcelona, se creó un reglamento de circulación propio (las Prescripciones Técnicas Operativas, PTO). Ese reglamento se ha integrado en el RCF, que es el vigente ahora. Cuando vimos las indicaciones de las señales apareció un aspecto que era la Parada Selectiva (foco rojo fijo con foco azul fijo o intermitente) y dijimos que significaba lo mismo que Parada para los trenes que no llevaran ETCS en servicio. Vamos a ver a continuación cuándo y cómo se dan esos aspectos de señal. Tenemos nuestro ya conocido cantón de BCA entre “A” y “B”.

Cantones típicos de un tramo con BCA
Con unos pequeños cambios y lo convertimos en un trayecto que va a tener ERTMS N1 y N2.

Cantones BCA con señalización ERTMS
Por simplificar un poco la imagen he quitado cantones BCA. Las señales se muestran con todos los colores que pueden dar. En las avanzadas el foco del centro está tapado porque no pueden dar rojo (y por tanto no necesitan tampoco focos blanco o azul).

Abrimos al tren que sale de “A” en Vía Libre y le hacemos también el paso directo por “B”.

Hasta ahora, todo normal, igual que lo vimos en el Bloqueo Automático. Vamos a mantener el itinerario de salida de “A” hecho, para que se abra la señal en cuanto pueda.

Cuando el tren pasa la primera pantalla BCA, la señal de salida de “A” cambia a Parada Selectiva con el foco azul fijo. Un tren con ETCS N2 recibiría en ese momento una MA hasta la primera pantalla BCA. Con N1 o sin ETCS no se puede mover.

El tren sigue avanzando y la señal de “A” se queda igual. La MA que recibiría el tren con N2 sería ahora hasta la segunda pantalla BCA. Con N1 o sin ETCS no puede moverse.

Igual que antes, pero la MA llegaría a la tercera pantalla BCA (N2). La señal avanzada de “B” no cambia porque no estamos en un BA y sólo cambia cuando cambie la señal de entrada.

El tren entra en “B”. La señal de salida de “A” cambia ahora a Parada Selectiva pero con el foco azul intermitente. Para el N2 la MA llega hasta la señal de entrada de “B”. Un tren con N1 ahora podría aproximarse a la señal para renovar la MA al paso por las balizas, que también llegaría hasta la señal de entrada de “B”. Un tren sin ETCS no puede moverse aún. La señal de salida de “A” no ha cambiado hasta que el trayecto ha estado completamente libre de trenes. Un tren con N2 no necesita señales, porque el DMI le dice todo. Un tren con N1 sí necesita señales que indiquen Parada, por lo que hasta que no ha quedado libre el tramo hasta la siguiente señal que puede indicarlo, no se le permite salir.

El tren que nos precedía ha continuado su camino y ha salido ya de “B”. Y aquí pueden ocurrir dos cosas. Que la instalación “evolucione” las señales hasta su estado final, o que lo haga sólo hasta el punto que le haya marcado el Responsable de Circulación. En nuestro ejemplo, dependiendo de la instalación, una vez que el tren ha liberado los circuitos de agujas de “B”, las señal de salida de “A” puede evolucionar a Vía Libre. O, si el RC ha hecho un “itinerario ERTMS”, se quedará en rojo-azul intermitente.
He representado en azul el “itinerario ERTMS”, aunque en la realidad el azul es para itinerarios de maniobras.
Por resumir lo visto aquí, el ERTMS (o ETCS) es un sistema de protección de trenes que pretende ser el estándar europeo. Tiene varios niveles de funcionamiento: el N0 que sería circular al amparo del sistema nacional, N1 que sería un sistema de información puntual y supervisión continua y N2 (o superiores) que sería un sistema de información y supervisión continuas. Y luego el Nivel STM, que sería usar el ETCS con funciones de sistema nacional. La transmisión de información puede ser a través de balizas, bucles de vía o radio.
Vamos a ver ahora similitudes con otros sistemas nacionales. Seguro que esto os sorprenderá.
Las eurobalizas son iguales y perfectamente compatibles con las balizas EBICAB. Los codificadores del EBICAB son prácticamente iguales y hacen las mismas funciones que los LEU. Los bucles de vía de los eurolazos (euroloop en inglés) son prácticamente idénticos a los bucles LZB. Pero es que, además, a nivel de información del DMI, los datos que necesita el maquinista para conducir y la forma de presentarlos es prácticamente igual tanto al EBICAB como al LZB, aunque es cierto que el DMI de ETCS tiene mucha más información y más funciones.
Más similitudes: el EBICAB es casi equivalente al ETCS N1 (no así el ASFA Digital, porque en realidad la supervisión de la velocidad es “semicontinua”) y el LZB ofrece las mismas protecciones que el ETCS N2.
O tal vez estas cosas no os hayan sorprendido tanto sabiendo que en el ERTMS Group participaban los fabricantes de señalización europeos y cada uno intentó arrimar el ascua a su sardina.
Entonces, si tanto se parece el ERTMS a sistemas que ya existían, ¿para qué tanto lío? Pues detrás de todo esto está la intención de la Unión Europea de acabar con los monopolios y favorecer la libre competencia. Si convertimos un sistema propietario como el EBICAB o el LZB en un estándar europeo, algunos fabricantes tienen una ventaja competitiva muy evidente en el mercado. Si creamos un estándar nuevo que coja todo lo bueno (o malo, según se vea) de otros sistemas, unos estarán en ventaja en unos aspectos y otros en otros, y así nadie sale mucho más beneficiado que el otro.
Por añadir algún dato más, el ERTMS en España está instalado en las siguientes líneas:
- Madrid Atocha-Barcelona-Frontera Francesa (LAV)
- Madrid Chamartín-Valencia (LAV)
- Bif. Albacete-Alicante (LAV)
- Monforte del Cid-Murcia (LAV)
- Madrid Chamartín-Burgos (LAV)
- Olmedo-Ourense (LAV)
- Ourense-Santiago (LAV)
- Vigo-Santiago-Coruña
- Venta de Baños-León (LAV)
- Variante de Pajares (LAV)
- C-4 Cercanías Madrid
- Córdoba-Málaga (LAV)
- Antequera-Granada (LAV)
- Enlaces entre LAVs
- Camp de Tarragona-Cambiador La Boella (enlace de la LAV MBF con el Corredor Mediterráneo)
Y se está implantando en:
- R-1, R-4 Norte y R-2 Sud de Rodalies Catalunya
- Corredor Mediterráneo
- Madrid Atocha-Sevilla (LAV)
- Resto de líneas en construcción
Me gusto la explicacion muy clara.